Dynamixel ROS Control¶
dynamixel_control_hw¶
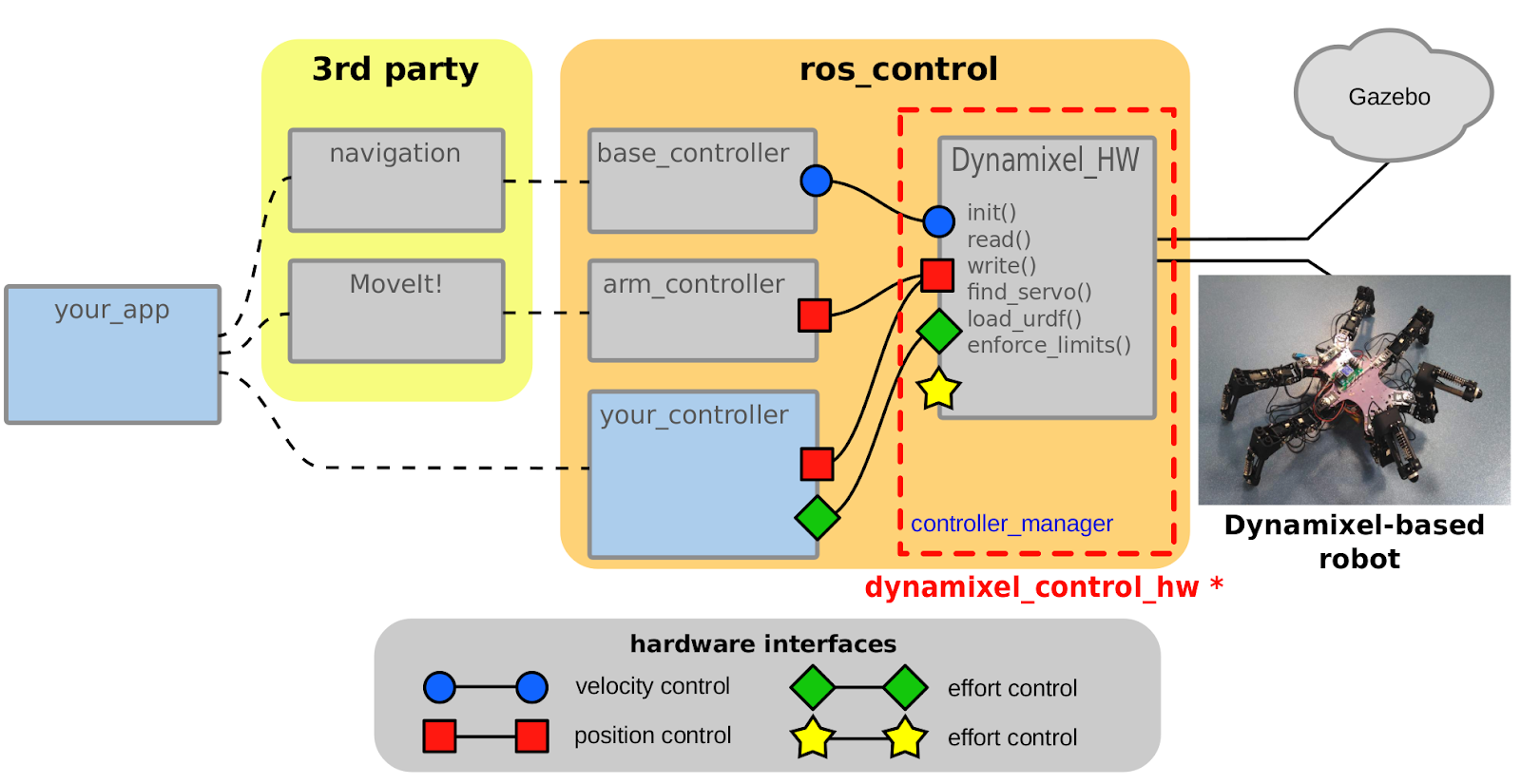
dynamixel_control_hw is a high-performance ROS control package for Dynamixel actuators (ROBOTIS ).
ROS control is a framework for control loops in ROS where the controller code is decoupled from the actual hardware interface.
Dynamixel is a range of all-in-one actuators (motor, gearbox, control board, PID, etc.) addressed through a RS-485 bus, which are very popular in robotics.
Features¶
- simple, ROS-style control interface for your dynamixel-based robot
- not specific to a given number or set of actuators
- position and velocity control
- works with both version of Dynamixel protocol (1 and 2)
- uses radians uniformly over all Dynamixel models (no need to worry about ticks-to-angle conversion)
- you can set an offset for each actuator’s position
- set names for your dynamixels in a configuration file
- joint limits
Overview¶
Contents¶
Indices and tables¶
Support¶
If you need some help, feel free to fill an issue on this repository. We’ll do our best to be responsive.