Lab & Robots (photos)¶
Check also the Videos.
The lab @ Inria Nancy¶


Our main experimental room contains a 5.5 x 6 m experimental ‘arena’ made with aluminium trusses. It is equipped with:
- a 6D motion capture system (Optitrack), with 8 gibagit cameras (Prime 13);
- 4 high-power, studio lights;
- 3 mobile 19” racks (on wheels), which host the power supplies and the computers to control the robots;
The trusses support the motion capture system and the lights, and hold all the cables (network, 220V, etc.).
Robots¶
Click on each image to see it bigger.
6-legged robots¶

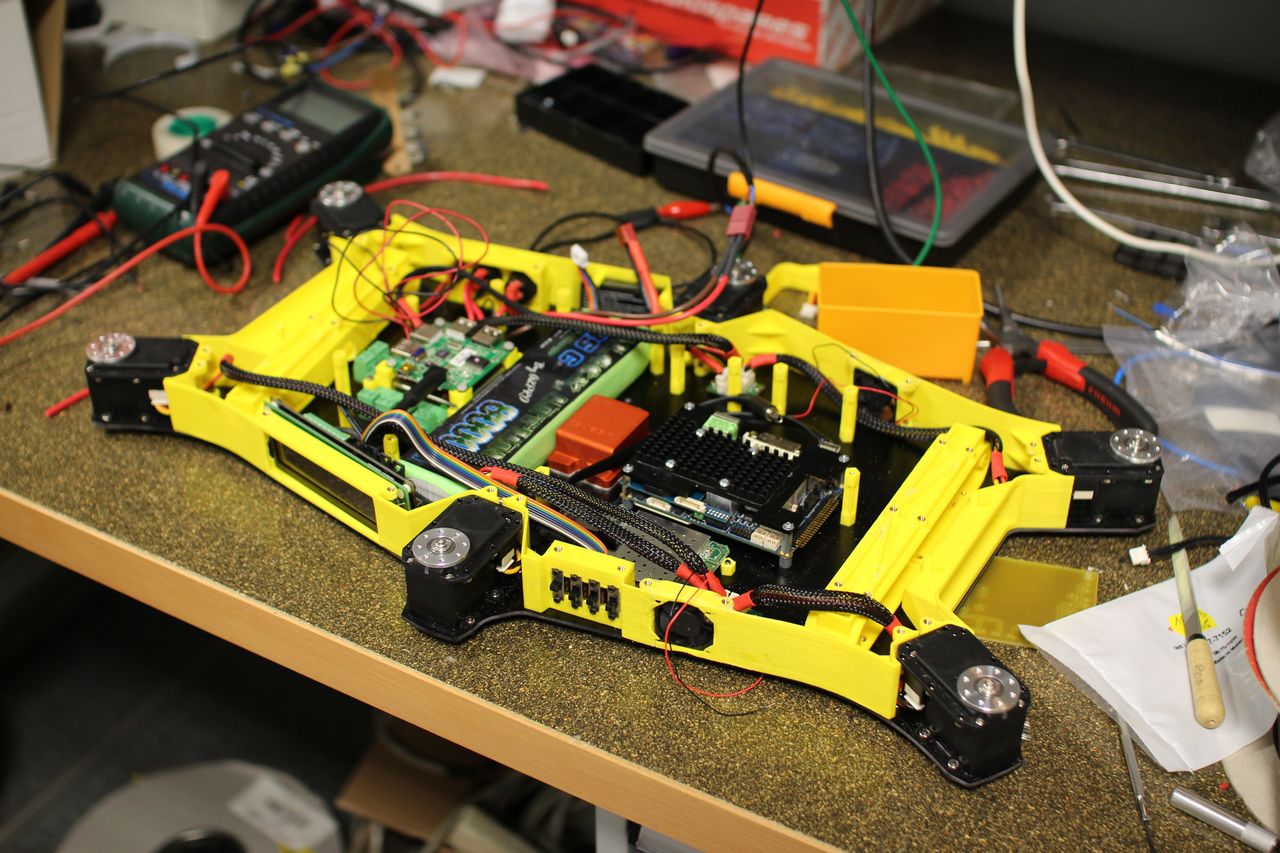
Our hexapod family based-on dynamixel actuators, from left to right : Pexod, miniHexa, Hexaforce
Pexod robot¶
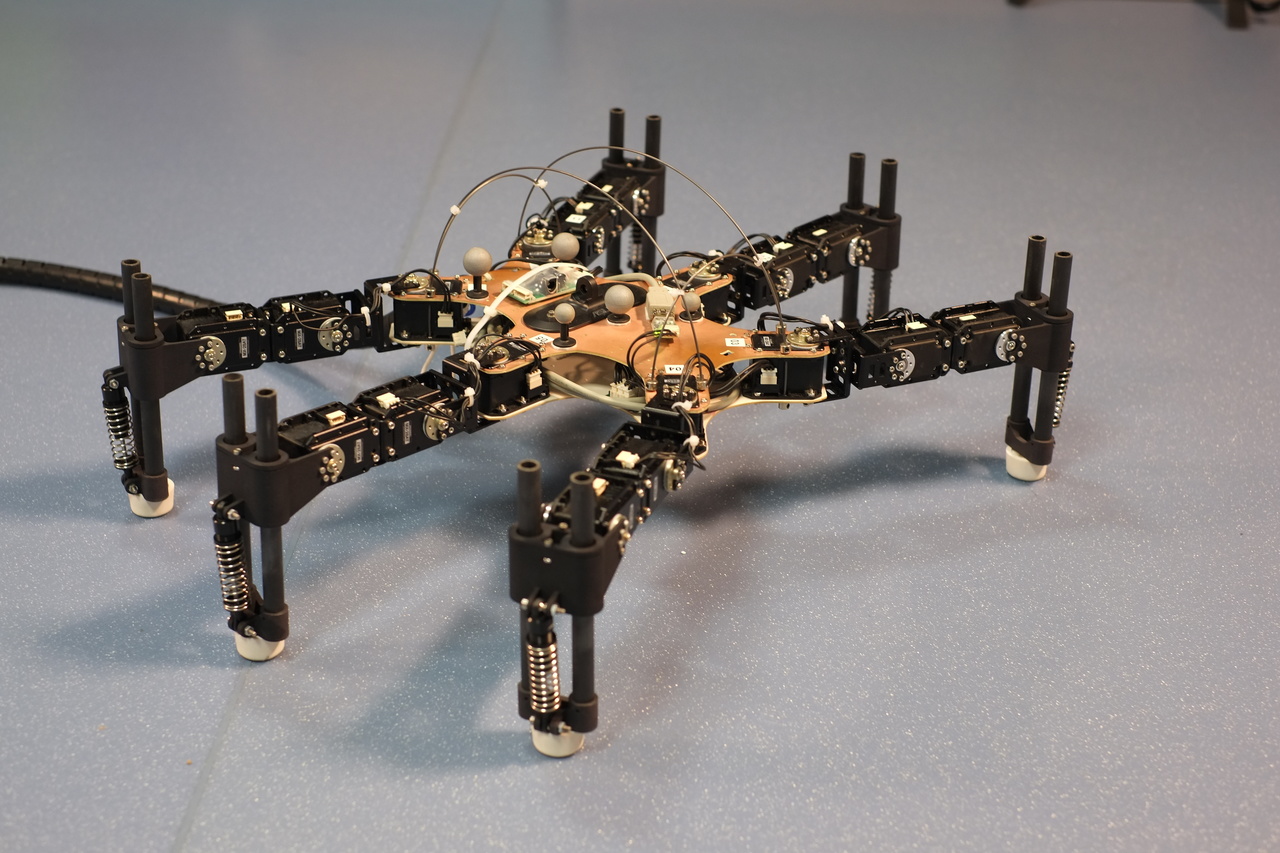
The last version of our 6-legged robot, which was featured on the cover of Nature (see Publications). Videos are available on the Videos page. This 6-legged robot is made with 18 MX-28 dynamixel actuators, a Xsens Mti-30 IMU, and a Asus x-tion (RGB-D sensor / Kinect). The silver spheres on top of the x-tion are for the motion tracking.
This robot is a demonstrator and a testbed for our adaptation algorithms. It has no direct intended application, but the algorithms that we test with it have appplications.
Hexaforce robot¶
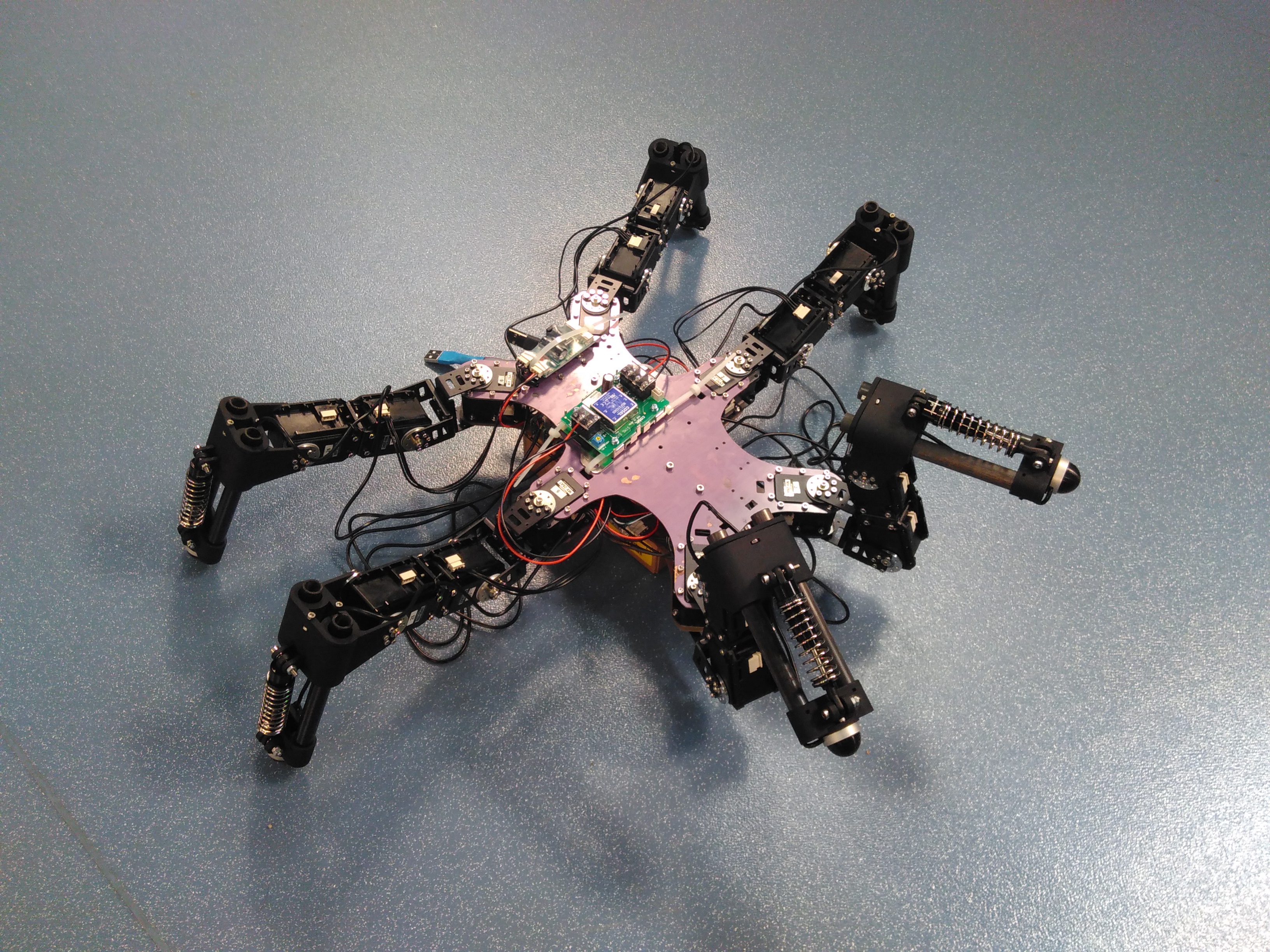
This 6-legged robot is made with 18 MX-28 dynamixel actuators, a Xsens Mti-30 IMU and feet sensors for measuring contact forces.
Minitaur robot¶
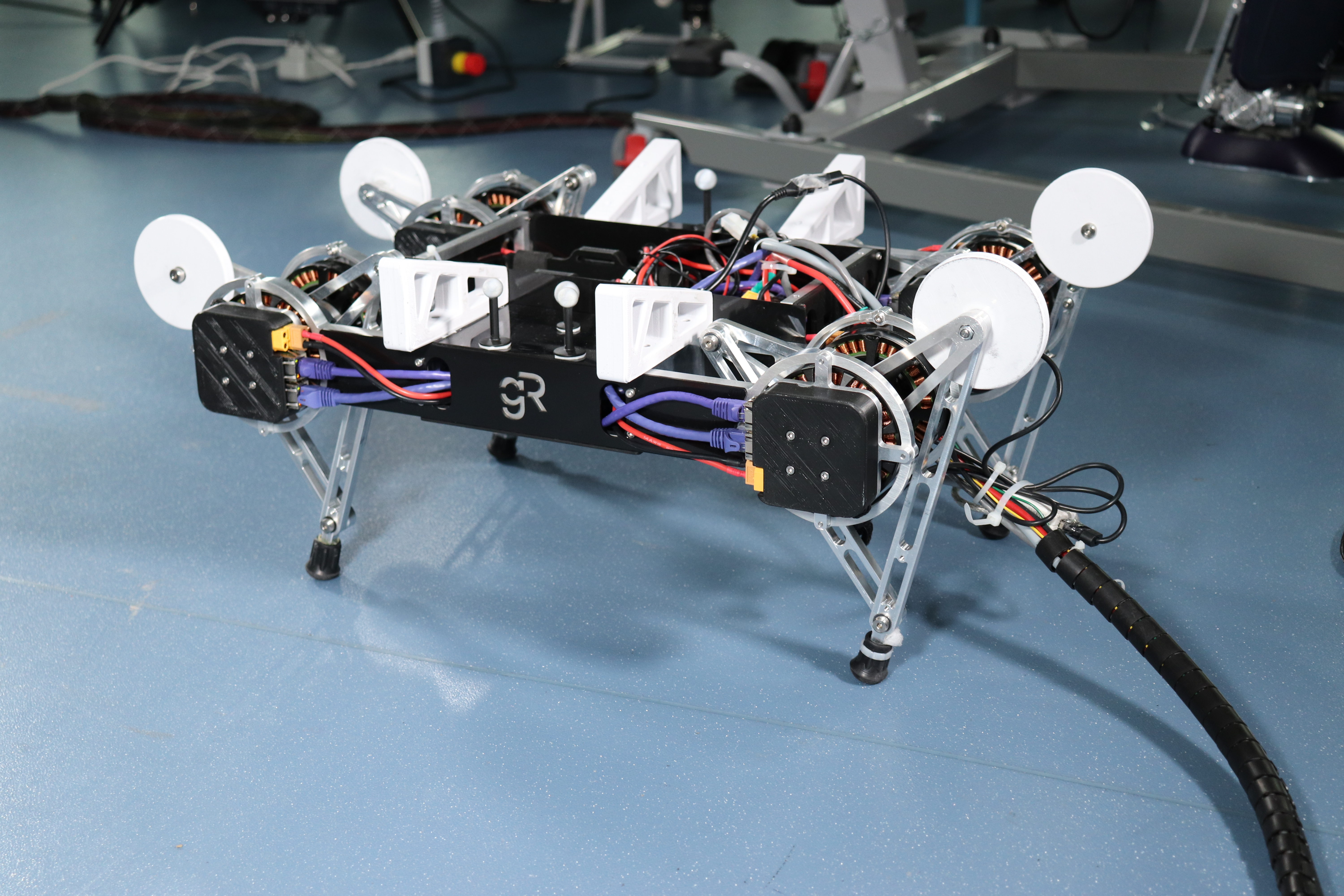
Minitaur is a quadruped robot design by Ghost Robotics . Minitaur is a small, highly agile, lightweight and dynamic direct-drive legged R&D platform.
Minitaur robot was design with an unique 5-bar kinematic leg and direct drive motors. The robot is really simple and robust in term of mechanisms.
This robot is also a demonstrator and a testbed for our adaptation algorithms.
Creadapt robot (wheel-leg hybrid)¶
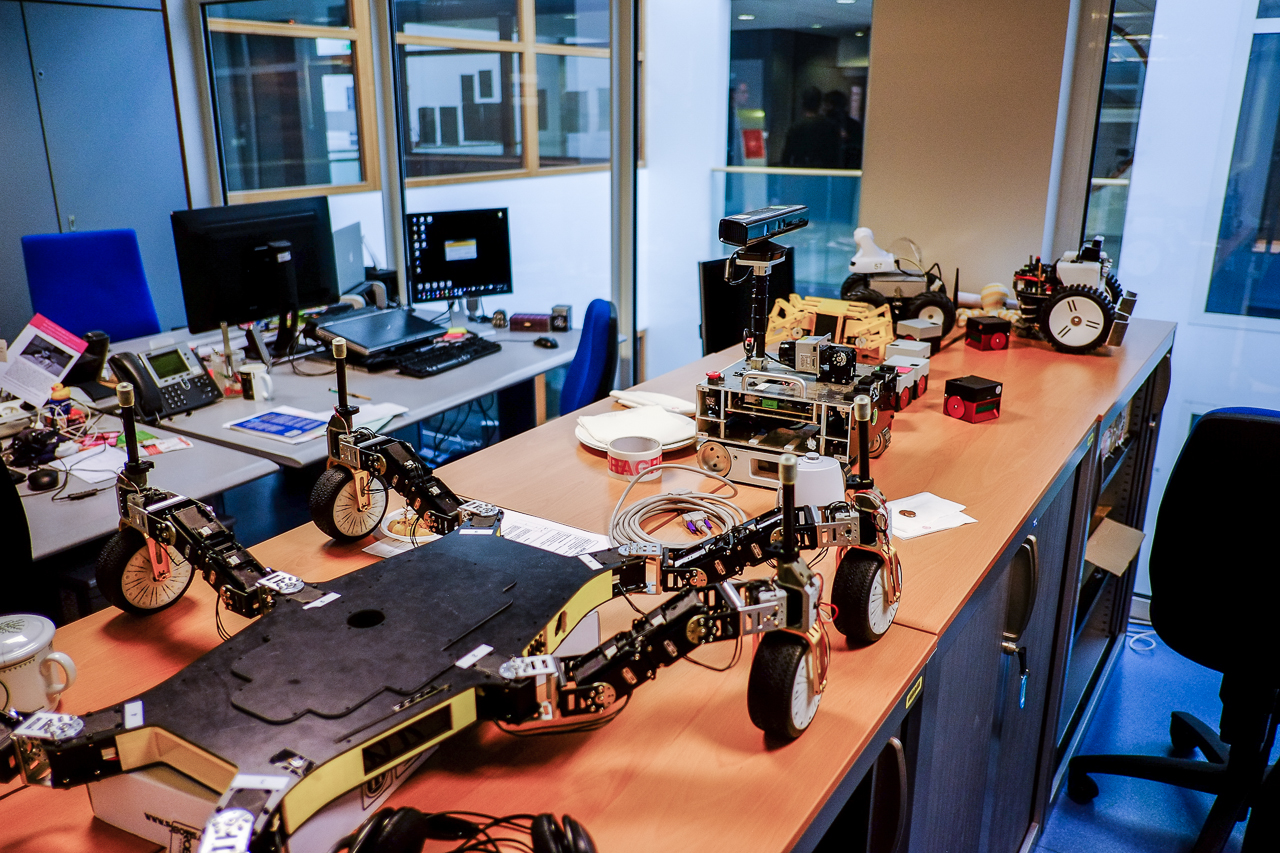
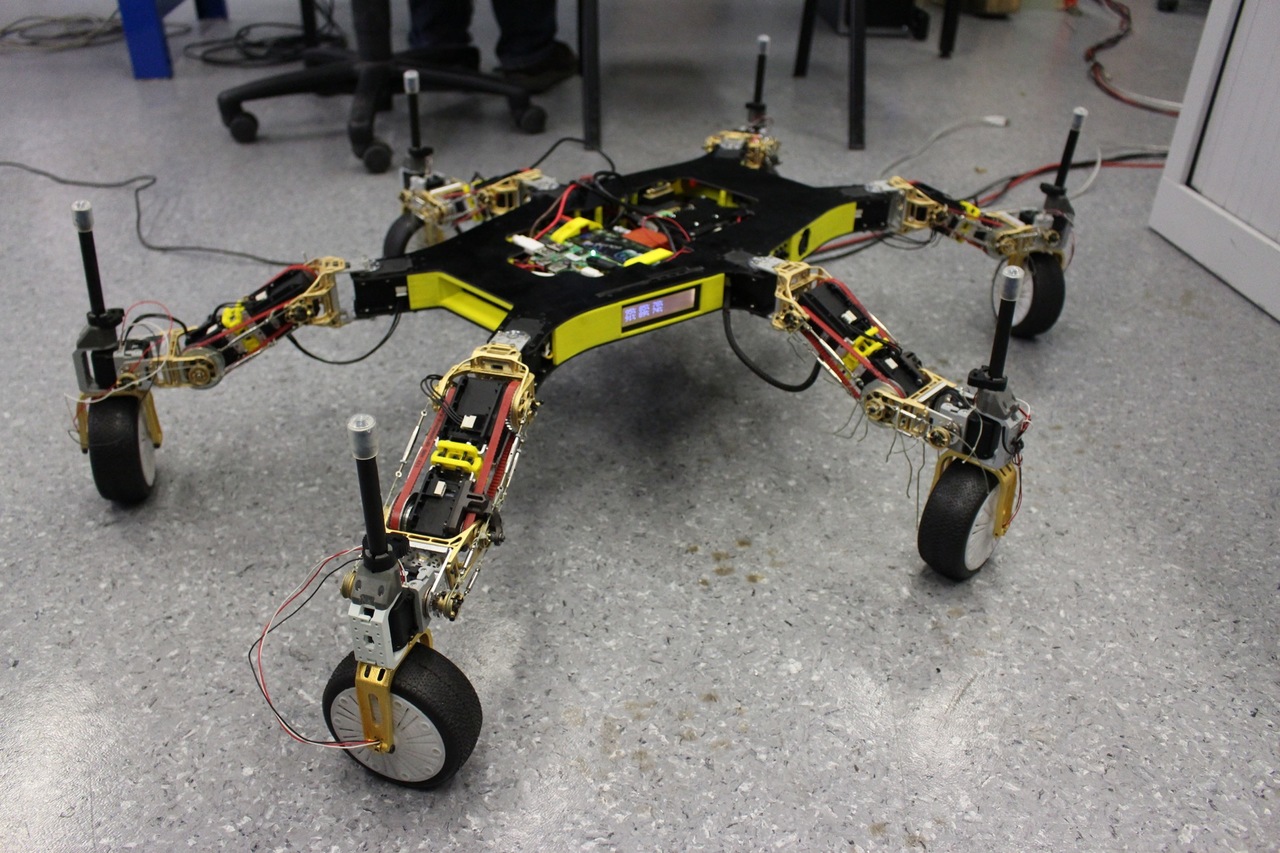
The Creadapt robot is wheel-leg hybrid robot that was developped in a previous project (ANR Creadapt). It is bigger than our 6-legged robot, and it has many more ways to move (drive, walk, …).
Kuka YouBot + Versaball¶
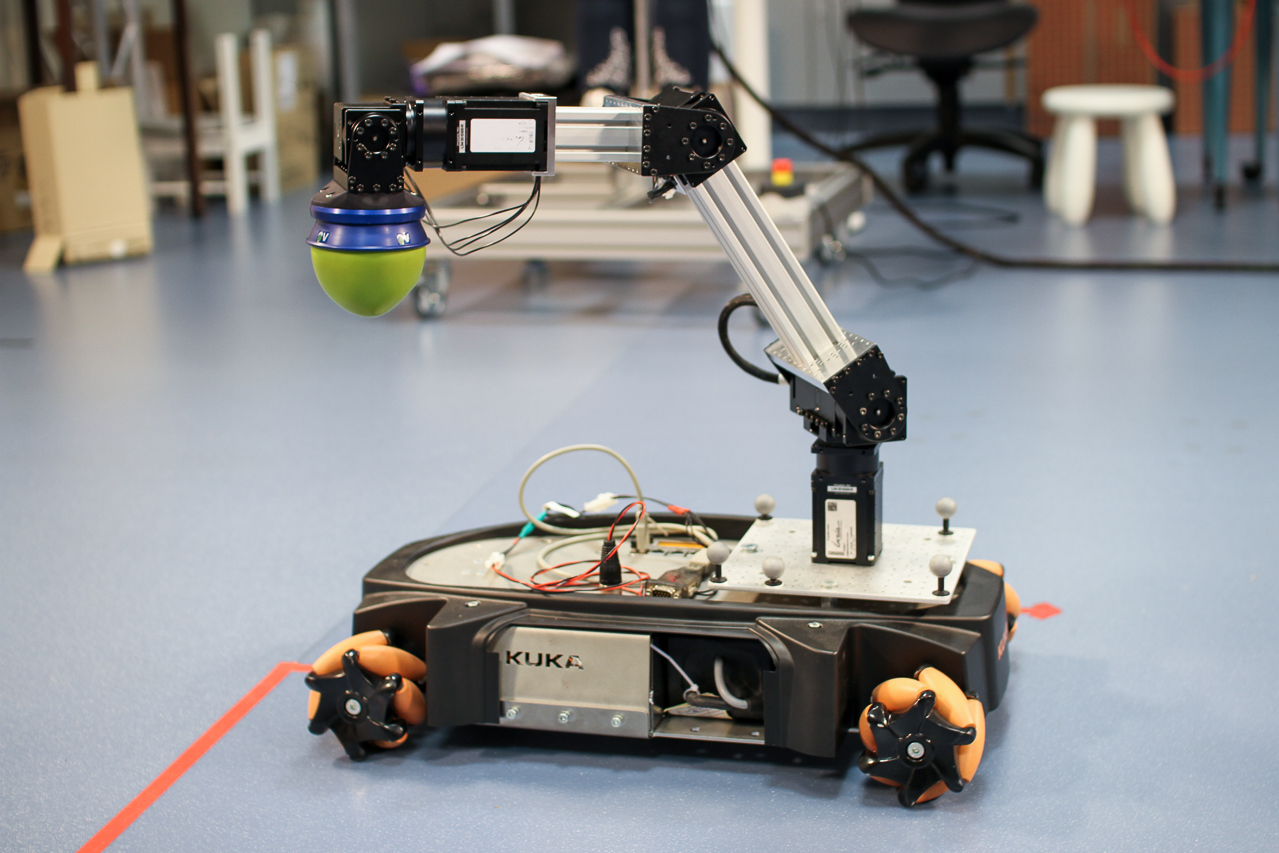
The YouBot is an omnidirectionnal robot manufactured by Kuka. We are modifying it to use the Versaball gripper (Empire Robotics).
Omnipointer¶

Omnipointer is a simple, low-cost robotic arm with four degrees-of-freedom. It is used for experiments that do not require the higher accuracy of the arm mounted on the YouBot.
iCub¶
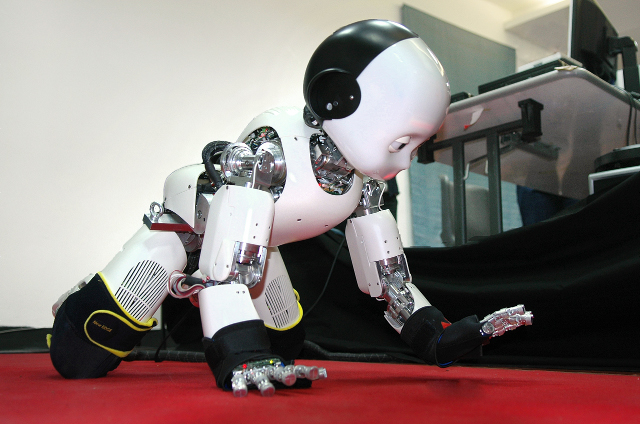
iCub is a child-like humanoid robot with 54 actuated degrees of freedom, force torque sensors, and a sensitive skin. We use it to test our algorithms for 4-legged crawling and 2-legged walking.